具有非视距遥操作功能的全地形消防机器人
作者:樊焕婷 时间:2023-10-28 点击数:
一、试用科研成果简介
具有非视距遥操作功能的全地形消防机器人是国家重点研发计划课题《系列特种灭火侦察消防机器人研制与应用技术》(编号:2016YFC0800607)的研究成果之一。该成果由应急管理部上海消防研究所牵头研制,适用于石油化工、油罐区、大型仓库、建筑物等高温、强热辐射、易坍塌等危险场所(消防车辆及人员无法靠近),替代消防员进行灭火、冷却、排烟、侦察、冷却等消防作业,可以避免消防人员伤亡等现象发生。该机器人具有地面适应性强、负载能力高、操作性能好的特点。成果的各项技术性能指标通过了国家消防装备质量监督检验中心的第三方委托检验;经上海科学技术情报研究所检索,成果达到国际先进水平。

二、功能特点
具有非视距遥操作功能的全地形消防机器人采用大行程纵臂式悬架、整体式承载框架、配合六轮全驱动设计,使其具有良好的地面自适应附着能力,能够轻松的在沼泽、草地、坑洼路面、连续驼峰、碎石等路面行走,跨越500mm障碍物,攀爬30°斜坡;同时,动力系统采用大容量动力电池组,动力充沛,机器人能够远程拖拽四根充实的消防水带前行,可负载超过550kg的重物;控制系统采用基于CAN总线的分布式模块化设计,通用化接口,上装可根据使用需求更换消防水炮、排烟机等不同功能模块;机器人采用低延时的视频传输系统,运用毫米波雷达透过烟雾探测火场障碍物,操纵者通过后场视频图像以及雷达探测图可远程操控机器人,真正意义实现在非视距条件下的无障碍远程操作控制。
三、性能参数
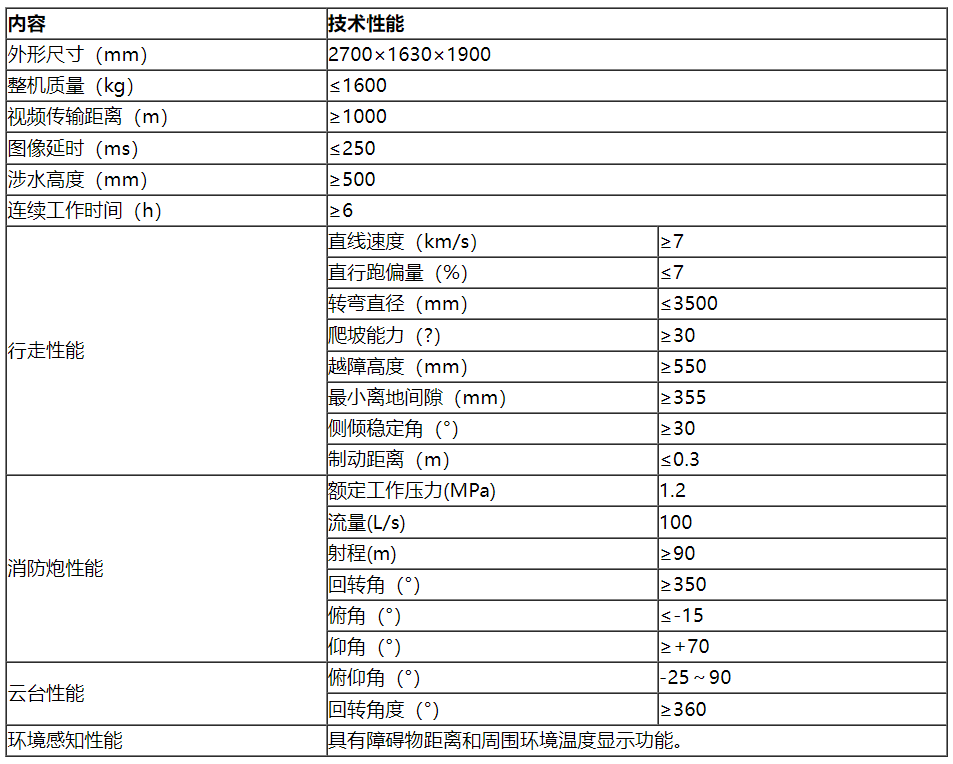
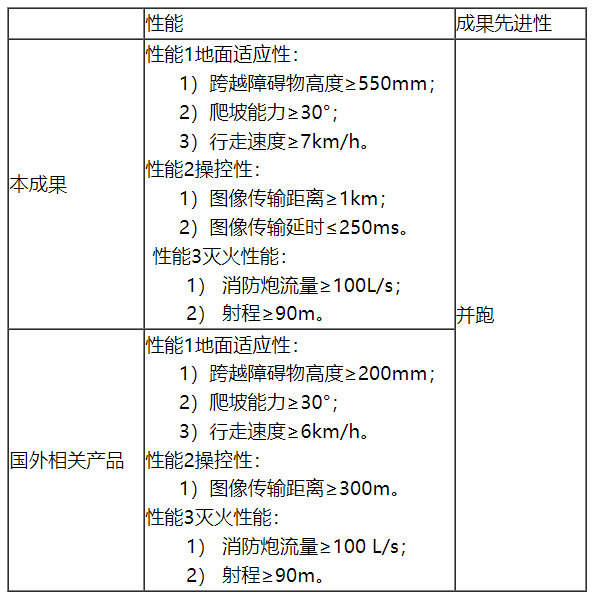
四、国内外技术对比
该成果与国内外同类先进产品比较:
转载自:http://www.shfri.com.cn/page/pc/scientific_research/3/general_results_detail/21/41




